Programming ATtiny84 / ATTiny44 with Arduino Uno
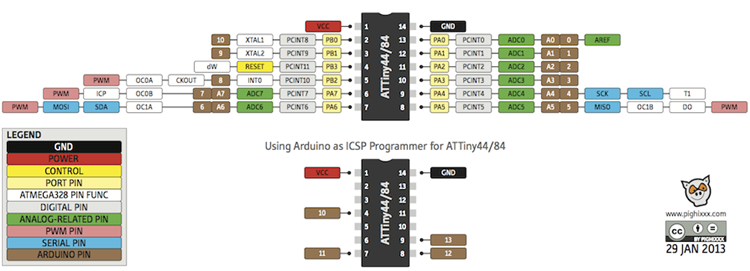
ATTiny84 ATTiny44 pinout
My order of ATTiny84 chips from Mouser arrived yesterday, so it is time to load the Arduino Blink example sketch onto it. I made a small line follower using the ATTiny85 a while back, and quite liked the idea of …
Programming ATtiny84 / ATTiny44 with Arduino Uno Read more »