Simple Water Detection Circuit
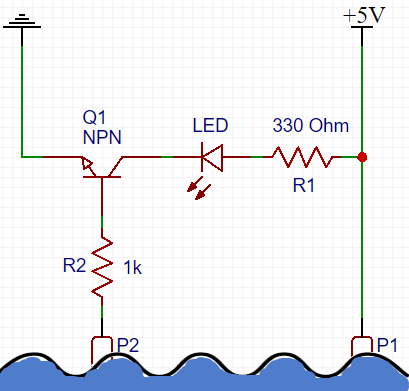
Water detection circuit
As part of a project to make DIY water activated diving flashing marker, I needed a simple circuit to detect when the marker is in contact with water. Turns all all it takes to do that is a a couple …