Project 3 – Ball sorter/collector – Step 1
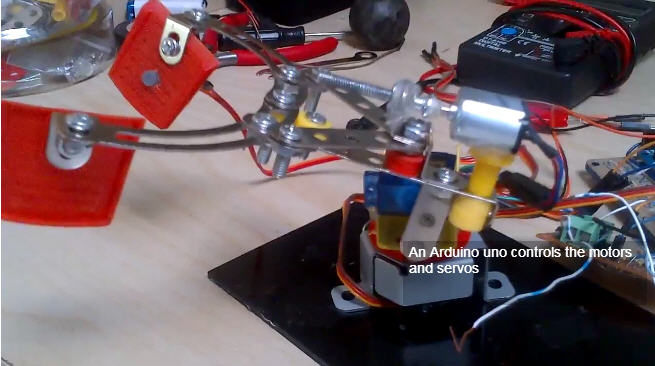
Experimenting potential configurations for a mechanical arm. Motor + screw as actuator. To do: – Stop motor when the clamp grabs something (without crushing it) – Add servos for 2 axis movement The planned steps for this project actually are: …