An Arduino self-balancing robot: working prototype
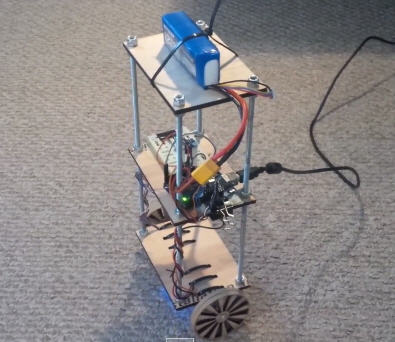
I spent some time reading on accelerometers, gyros, sensor fusion, PID, optimized PWM motor control. I tinkered with the components I have for a while and then procrastinated for even longer. Finally, I can say that I have a prototype …
An Arduino self-balancing robot: working prototype Read more »