Arduino script for MPU-6050 auto-calibration
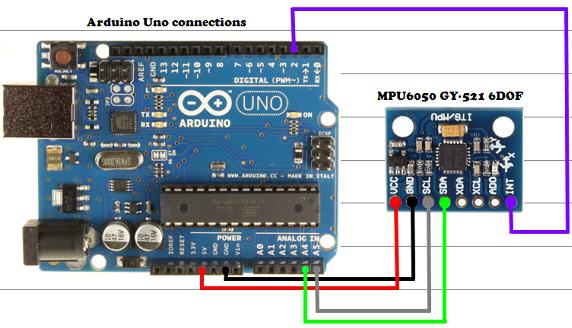
I while back I did some work on a self-balancing robot using and Arduino Uno and the InvenSense MPU-6050 6DOF sensor. Using the sensor is easy, thanks to Jeff Rowberg’s I2Cdev library and sample code. If you look around line 200 …